Small brains, complex challenges…
The superb navigational skills of ants and bees are proof that small brains can achieve amazingly efficient behaviours in complex environments. We seek to uncover the link between neural dynamics and behavioural decisions, when these insects navigate in their natural habitat. We focus on ant species that are champion visual navigators, who spontaneously learn long routes and home from distant locations. Actually, many ant species do so in various habitats!
We combine computational models based on the insect neural circuitry with behavioural experiments, whether directly in the field or in the lab where ants can navigate within Virtual Reality set-ups. The models enable to explore the complex relationship between the brain, body, and environment; and (hopefully) produce testable behavioural predictions. The behavioural experiments enable to test the models’ predictions, and (hopefully) unravel unsuspected abilities in these little creatures.
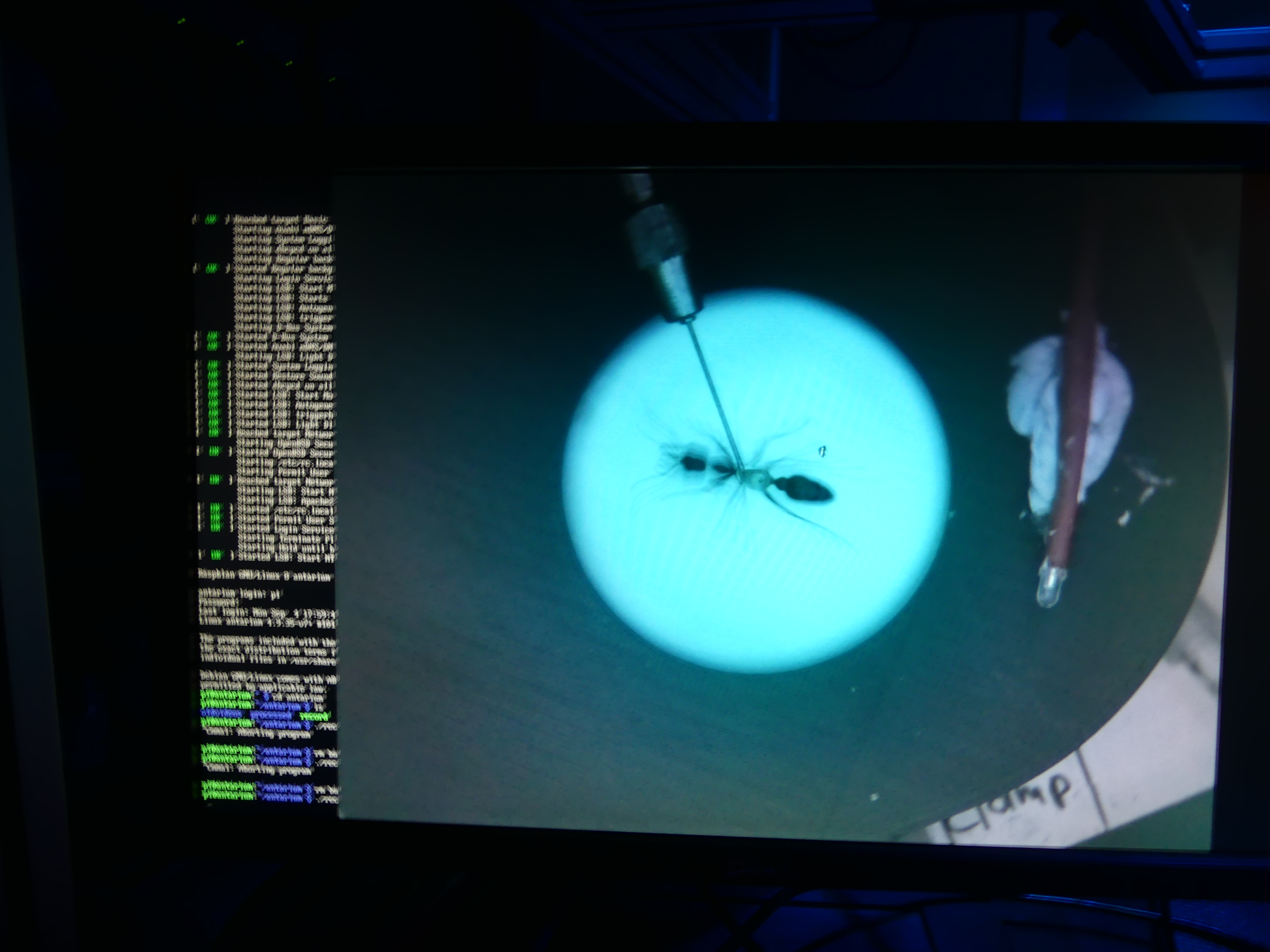
Trackball
A treadmill for ants?!
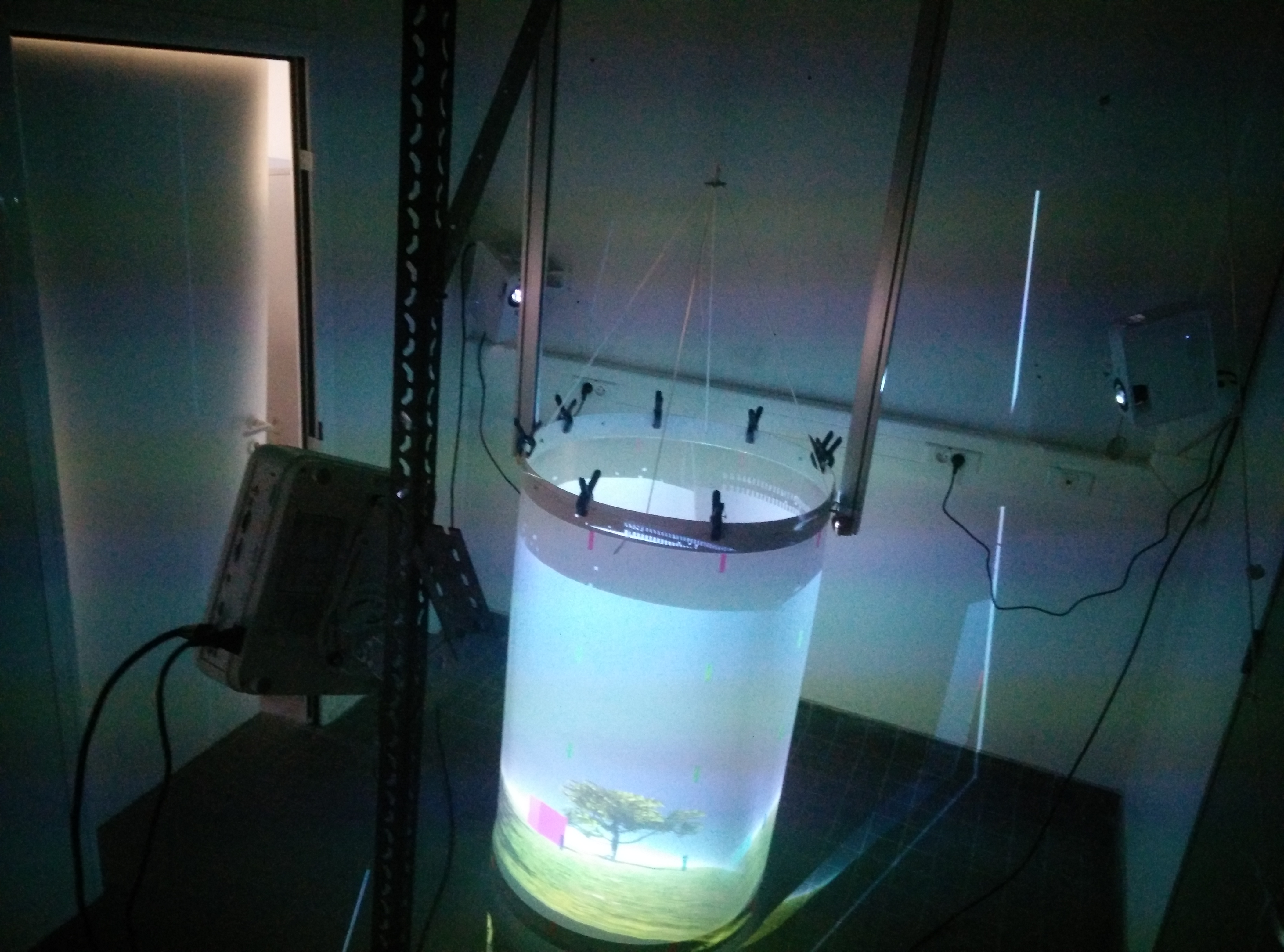
Virtual Reality
Insects play videogames too…
Models
The nerdy stuff